LCDキャラクター・ディスプレイは余り使われなくなってきたかもしれませんが、廉価で、OLEDと比較にならないほど容量を食わず、今でも電子工作に重宝なデバイスだと思いますがどうでしょう?
多くのマイコンでは標準ライブラリーがあり、I2Cで楽に接続できるという点、それに海外ネットで廉価で出回っている点も助かります。そういうわけで、私はESPやArduinoなどではこれをしばしば使うので手持ちが沢山あります。16桁2行と20桁4行が普通で、私の持っているのは1個あたりそれぞれ200円、400円ぐらいでした。
確認のために今eBayをちらとみると次です。もっと廉価なのも多いかもしれませんし、Aliでも廉価なものが多いだろうなと思います。表示色は青に白字が多いですが、黄色や緑に黒字、あるいは緑に白字などもあります。ただしI2C接続でないものもありますから注意が必要です。

LCD自体は相当古い日立のHD44780Uドライバーで動かす、日立液晶ディスプレイのコンパチ機です。それにTIのPCF8574(I2Cパラレルポート・エキスパンダーIC)または同等ICを接続して、I2Cで簡単に動くようになっているものです。
LCD自体は今でも日立との互換LCDであるというところがすごい!どれにも基本的には日立のA00という文字セットが含まれ、多数使われている海外でも、なんとカタカナを表示するところがとてもおかしいのですが^^;
古い日立のデータシートを見ると内蔵文字の基本パターンは次です。
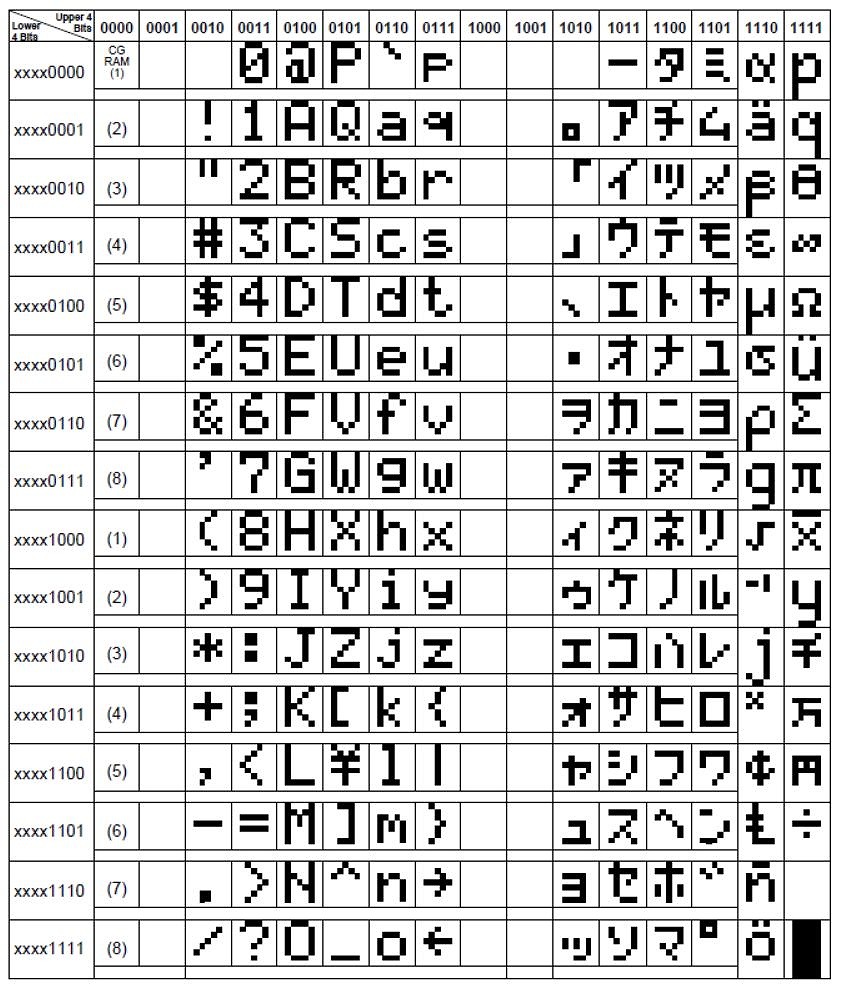
海外通販で購入したもので全文字を表示してみたら、次のようになっています。

全部比較すると日立のと完全に同じですね!
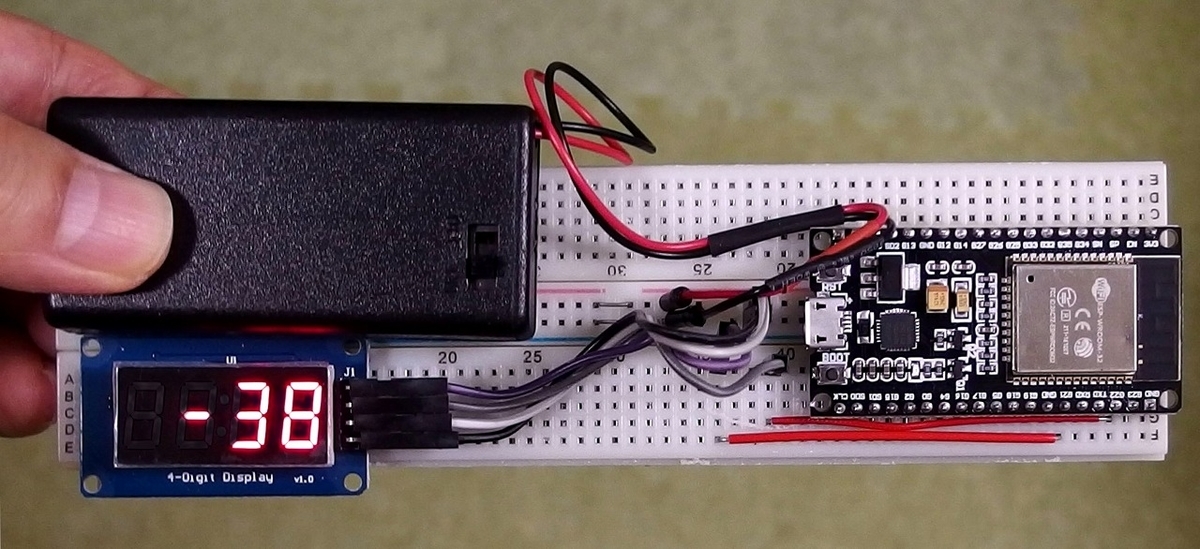
これを表示したときの簡単なテストの様子は次の写真です。

Arduinoでは標準的なLiquidCrystalライブラリーを、New_LiquidCrystal_I2Cライブラリーで置き換えることで最近の型も動作します。前に次の記事の最後に書き足したかと思います。。
マイコンとPCのデータ授受ーSmallbasicなら簡単 (2020.12.05 LiquidCrystal_I2Cについて補足しました) - 勝手な電子工作・・
ところが、このLCDのイニシャライズの中身は理不尽なほど複雑です^^; かつデータはドライバーから4ビットパラレル接続となっているため、ライブラリーなしで直接扱うときは1文字を2回に分けて送る必要があったりします。つまりプロトコルも輪をかけて複雑に。
今回はこの廉価なLCDを小さな8ピンPICに簡単につなぐ挑戦です。いつかはPICにつなごうと思っていましたが、他のI2Cデバイスはともかくも、このLCDだけは上に書いたような理由でコードの手書きは敬遠していました。
しかし、この週末にPICでの手作りを遂にやってみました!
今回のPICは5~6年前に1個60円ほどで大量購入した12F1822なのですが、手元に残っているので利用。今見ると秋月では110円に値上がりしたようですね。もちろん8ビットPICならどれでもほぼ大丈夫と思います。
この小さなPICはプログラムメモリーが2Kしかなく、RAMはわずか128バイトしかありません。しかし16MHzクロックで動きPIC Assemblerで書けばかなりのことができる優れものです。周辺装置の役割として何にでも便利に使っています。ライブラリーを使わない場合は容量は十分です。
まずは複雑プロトコルを解析するために、使う機能だけを選んでArduinoでごく簡単なテストをします。次のスケッチです。
/**********************************************************
Simple test-A for protocol analysis
Dec. 19, 2020 by Akira Tominaga
Remarks: Use Arduino, ESP32, or ESP8266 etc.
Connect SCL and SDA to LCD-I2C pins.
***********************************************************/
#include "LiquidCrystal_I2C.h" // New_LiquidCrystal_I2C library
#define i2cA 0x27 // LCD's I2C address
// addr, LCD-pins, BL addr,en,rw,rs,d4,d5,d6,d7,bl,blpol
LiquidCrystal_I2C lcd(i2cA, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE);
void setup() { // ***** Arduino setup *****
delay(10);
// case #1 lcd.begin
lcd.begin(20, 4);
delay(300);
// case #2 lcd.backlight() (unneeded?)
lcd.backlight();
delay (200);
// case #3 lcd.clear
lcd.clear(); // clear LCD
delay(100);
// case #4 cursor line 3 ,col 15
lcd.setCursor(15, 3);
delay(200);
// case #5 cursor line 2 ,col 8
lcd.setCursor(8, 2);
delay(300);
// case #6 cursor line 1 ,col 5
lcd.setCursor(5, 1);
delay(200);
// case #7 cursor line 0 ,col 0
lcd.setCursor(0, 0);
delay(100);
// case #8 lcd.print
lcd.print("ABC");
lcd.print("123");
while (true) {} // stop here
}
void loop() { // ***** Arduino loop *****
// do nothing
}

Decode結果は次のとおりです。
Time [s] Decoded Protocol Result
0.00000925 Setup Write to [0x4E] + ACK
150μS 1)
0.00014925 Setup Write to [0x4E] + ACK
0.0002445 0x00 + ACK
100mS 2)
0.10040025 Setup Write to [0x4E] + ACK
0.1004955 0x34 + ACK
0.10063475 Setup Write to [0x4E] + ACK
0.10073 0x30 + ACK
5mS 3)
0.105399 Setup Write to [0x4E] + ACK
0.10549425 0x34 + ACK
0.1056335 Setup Write to [0x4E] + ACK
0.10572875 0x30 + ACK
250μS 4)
0.106023 Setup Write to [0x4E] + ACK
0.106118 0x34 + ACK
0.10625725 Setup Write to [0x4E] + ACK
0.1063525 0x30 + ACK
250μS 5)
0.1066465 Setup Write to [0x4E] + ACK
0.10674175 0x24 + ACK
0.10688075 Setup Write to [0x4E] + ACK
0.106976 0x20 + ACK
250μS 6)
0.10727025 Setup Write to [0x4E] + ACK
0.1073655 0x24 + ACK
0.1075045 Setup Write to [0x4E] + ACK
0.10759975 0x20 + ACK
0.10774875 Setup Write to [0x4E] + ACK
0.107844 0x84 + ACK
0.10798325 Setup Write to [0x4E] + ACK
0.10807825 0x80 + ACK
200μS 7)
0.1082825 Setup Write to [0x4E] + ACK
0.10837775 0x04 + ACK
0.10851675 Setup Write to [0x4E] + ACK
0.108612 0x00 + ACK
0.10875625 Setup Write to [0x4E] + ACK
0.10885125 0xC4 + ACK
0.1089905 Setup Write to [0x4E] + ACK
0.10908575 0xC0 + ACK
150μS 8)
0.10922975 Setup Write to [0x4E] + ACK
0.109325 0x04 + ACK
0.10946425 Setup Write to [0x4E] + ACK
0.1095595 0x00 + ACK
0.1097035 Setup Write to [0x4E] + ACK
0.10979875 0x14 + ACK
0.109938 Setup Write to [0x4E] + ACK
0.11003325 0x10 + ACK
2mS 9)
0.11219225 Setup Write to [0x4E] + ACK
0.1122875 0x04 + ACK
0.11242675 Setup Write to [0x4E] + ACK
0.11252175 0x00 + ACK
0.112666 Setup Write to [0x4E] + ACK
0.11276125 0x64 + ACK
0.11290525 Setup Write to [0x4E] + ACK
0.1130005 0x60 + ACK
150μS 10)
0.11313975 Setup Write to [0x4E] + ACK
0.113235 0x08 + ACK
300mS lcd Backlight
0.4133845 Setup Write to [0x4E] + ACK
0.41347975 0x08 + ACK
200mS lcd Clear
0.6136425 Setup Write to [0x4E] + ACK
0.61373775 0x0C + ACK
0.613877 Setup Write to [0x4E] + ACK
0.61397225 0x08 + ACK
0.61411625 Setup Write to [0x4E] + ACK
0.6142115 0x1C + ACK
0.61435075 Setup Write to [0x4E] + ACK
0.614446 0x18 + ACK
Set cursor 15,3
0.716622 Setup Write to [0x4E] + ACK
0.71671725 0xEC + ACK
0.7168565 Setup Write to [0x4E] + ACK
0.71695175 0xE8 + ACK
0.717096 Setup Write to [0x4E] + ACK
0.71719125 0x3C + ACK
0.7173305 Setup Write to [0x4E] + ACK
0.7174255 0x38 + ACK
Set cursor 8,2
0.9175885 Setup Write to [0x4E] + ACK
0.91768375 0x9C + ACK
0.917823 Setup Write to [0x4E] + ACK
0.91791825 0x98 + ACK
0.91806225 Setup Write to [0x4E] + ACK
0.9181575 0xCC + ACK
0.91829675 Setup Write to [0x4E] + ACK
0.918392 0xC8 + ACK
Set cursor 5,1
1.2185565 Setup Write to [0x4E] + ACK
1.21865175 0xCC + ACK
1.218791 Setup Write to [0x4E] + ACK
1.21888625 0xC8 + ACK
1.2190305 Setup Write to [0x4E] + ACK
1.21912575 0x5C + ACK
1.21926475 Setup Write to [0x4E] + ACK
1.21936 0x58 + ACK
Set cursor 0,0
1.419528 Setup Write to [0x4E] + ACK
1.419623 0x8C + ACK
1.41976225 Setup Write to [0x4E] + ACK
1.4198575 0x88 + ACK
1.42000175 Setup Write to [0x4E] + ACK
1.420097 0x0C + ACK
1.42023625 Setup Write to [0x4E] + ACK
1.4203315 0x08 + ACK
write "ABC123"
1.5204875 Setup Write to [0x4E] + ACK
1.52058275 0x4D + ACK
1.520722 Setup Write to [0x4E] + ACK
1.520817 0x49 + ACK
1.52096125 Setup Write to [0x4E] + ACK
1.5210565 0x1D + ACK
1.52119575 Setup Write to [0x4E] + ACK
1.521291 0x19 + ACK
1.52144025 Setup Write to [0x4E] + ACK
1.52153525 0x4D + ACK
1.5216745 Setup Write to [0x4E] + ACK
1.52176975 0x49 + ACK
1.521919 Setup Write to [0x4E] + ACK
1.52201425 0x2D + ACK
1.5221535 Setup Write to [0x4E] + ACK
1.52224875 0x29 + ACK
1.52239775 Setup Write to [0x4E] + ACK
1.522493 0x4D + ACK
1.52263225 Setup Write to [0x4E] + ACK
1.5227275 0x49 + ACK
1.52287175 Setup Write to [0x4E] + ACK
1.522967 0x3D + ACK
1.52310625 Setup Write to [0x4E] + ACK
1.52320125 0x39 + ACK
1.5233555 Setup Write to [0x4E] + ACK
1.52345075 0x3D + ACK
1.52359 Setup Write to [0x4E] + ACK
1.52368525 0x39 + ACK
1.5238295 Setup Write to [0x4E] + ACK
1.5239245 0x1D + ACK
1.52406375 Setup Write to [0x4E] + ACK
1.524159 0x19 + ACK
1.52430825 Setup Write to [0x4E] + ACK
1.52440325 0x3D + ACK
1.5245425 Setup Write to [0x4E] + ACK
1.52463775 0x39 + ACK
1.524782 Setup Write to [0x4E] + ACK
1.52487725 0x2D + ACK
1.52502125 Setup Write to [0x4E] + ACK
1.5251165 0x29 + ACK
1.52526575 Setup Write to [0x4E] + ACK
1.525361 0x3D + ACK
1.52550025 Setup Write to [0x4E] + ACK
1.52559525 0x39 + ACK
1.5257395 Setup Write to [0x4E] + ACK
1.52583475 0x3D + ACK
1.525974 Setup Write to [0x4E] + ACK
1.52606925 0x39 + ACK
Arduinoではこのスレーブ・アドレスは0x27ですが、通信では左に1ビットずらしてWriteの場合はビット0をオフにするので、送出アドレスは0x4Eとなります。
Initialize以外は比較的簡単にわかるプロトコルですが、lcd.setCursor(column,row)のプロトコル解析は、まるでクイズのようで少し手こずってしまいました。結局は連立方程式などを作って解き、やっとわかりました(汗)。
使おうとしているプロトコルを「まとめると、次の手順になっています。
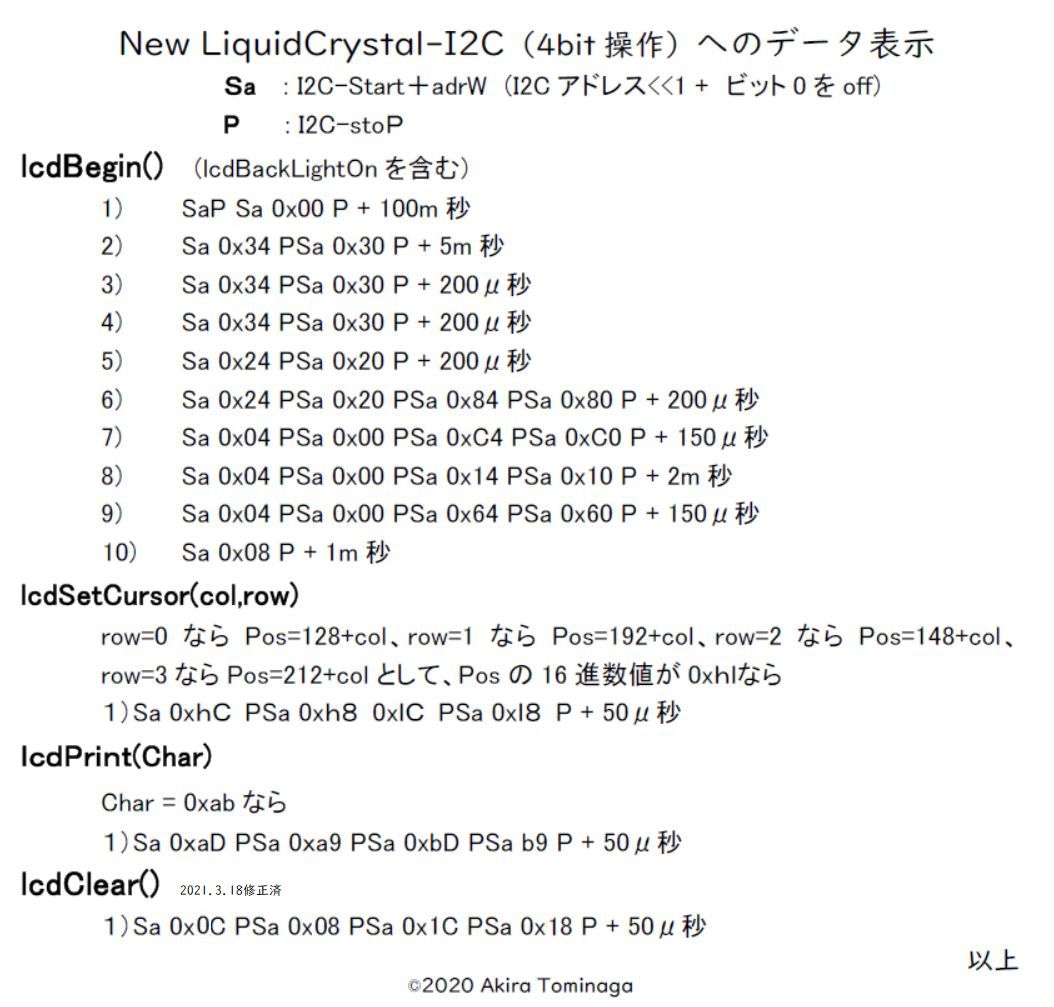
つまり、細かい検討をしなくともこの通りに作れば必ず動く!というわけです。
今回、PICは次のように配線することにします。毎度手書きのきたない回路図ですみませんが。今回はピンが限られたハードウェアI2C機構を用いず、RA3以外ならどのピンを使ってもOKとなるようにしました。

図に書いたLEDは今は必要がないので特につけていません。I2Cの汎用接続が他に使える利点に加えて、3つのピンが空いており、他のセンサー等を色々つけられます^^
マイコンの容量を消耗しないよう、こういうものはアセンブラーでうまく組みます。
;U201219-I2CLCD-V00.asm As of Dec. 19, 2020
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; ;
; Teting I2C-Liquid-Crystal-Display with PIC-12F1822 V00-00 ;
; (c)2020 Akira Tominaga, All rights reserved. ;
; Major revisions ;
; 00-00 Initial Version Dec.19, 2020 ;
; ;
; Function ;
; 1.Show characters to LCD (New_LiquidCrystal_I2C 4bit op.) ;
; ;
; Input/output ;
; RA0 LED output when debugging ;
; RA1 SCL for I2C output ;
; RA2 SDA for I2C output usually, and input occasionally ;
; ;
; Remarks ;
; 1. Clock = HFINTOSC ( 16MHz) ;
; Hence 1 step = 0.25 micro seconds ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
list p=12F1822 ; list directive to define processor
#include "p12F1822.inc" ; Device specific variable definitions
__CONFIG _CONFIG1, _FOSC_INTOSC & _WDTE_OFF & _PWRTE_OFF & _MCLRE_OFF & _CP_OFF & _CPD_OFF & _BOREN_OFF & _CLKOUTEN_OFF & _IESO_OFF & _FCMEN_OFF
__CONFIG _CONFIG2, _WRT_OFF & _PLLEN_OFF & _STVREN_OFF & _BORV_LO & _LVP_OFF
; page
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Macro definitions ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Device dependent Macros ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;*** Setting up PIC device ***
DEVset macro
BANKSEL OSCCON ; Bank=1
movlw B'01111010' ; 16MHz and internal oscillator
movwf OSCCON
;
; BANKSEL INTCON ; Interrupt Con (in all banks hence comment)
clrf INTCON ; Disable all interrupts
;
; PORTA initialization
BANKSEL PORTA ; Bank=0
clrf PORTA
; BANKSEL LATA ; Bank=2
; clrf LATA
BANKSEL ANSELA ; Bank=3
clrf ANSELA ; No use of ADC
BANKSEL ADCON0 ; Bank=1
clrf ADCON0 ; No use of ADC
;
BANKSEL TRISA ; Bank=1
movlw B'11111000' ; RA0,1 and 2 are output
movwf TRISA
;
BANKSEL OPTION_REG ; Bank=1
bcf OPTION_REG,7 ; Enable weak pull-up
BANKSEL WPUA ; Bank=4
movlw B'00111000' ; Weak Pull-up for RA3,4,and 5
movwf WPUA ;
;
clrf BSR ; Bank=0
InitP ; Initialize ports
endm
;
; *** Initializing IO ports ***
InitP macro ; Initialize ports
movlw B'11111110' ; All IOs on, excluding RA0
movwf PORTA
endm
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; I2C Macros for genral purpose ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; *** for I2C-Master protocol ***
; Sending data to I2C slave
I2Csnd macro slave,dataa,datalen
movlw slave
movwf I2Cadr
movlw dataa
movwf FSR0L
movlw datalen
movwf DataLen
call I2Csndr
endm
;
; *** Receiving data from I2C slave ***
I2Crcv macro slave,dataa,datalen
movlw slave
movwf I2Cadr
movlw dataa
movwf FSR0L
movlw datalen
movwf DataLen
call I2Crcvr
endm
;
; *** I2C start signal ***
I2Cstat macro
call I2Cstar
endm
;
; *** I2C stop signal ***
I2Cstop macro
call I2Cstpr
endm
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; I2C Macros for New_LiquidCrystal_I2C ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; ***** for New LiquidCrystal-I2C *****
; *** Start I2C, send LCD adr, and get Ack, without stoP ***
LCDsA macro
call lSndAr ; I2C start and send it
endm
;
;*** Start, I2C,send LCD adr, and send Literal and stoP ***
LCDl macro lcdLit
movlw lcdLit
call lSndALr
endm
;
; *** Set cursor (Col, Row) ***
LCDsetC macro Col,Row
if Row==0
movlw H'80'+Col
endif
if Row==1
movlw H'C0'+Col
endif
if Row==2
movlw H'94'+Col
endif
if Row==3
movlw H'D4'+Col
endif
if Row>3
* row error *
endif
call lSetCsr
endm
;
; *** lcd.write a char ***
LCDw macro lcdChr
movlw lcdChr
call lSetChr
endm
;
; *** lcd.clear() ***
LCDclr macro
call lClr
endm
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Time cosuming macros ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Mic macro ;Consume 1 μS only
goto $+1
goto $+1
endm
;
Mic2 macro mic2p ;Consume 2 μS x n
movlw mic2p
call Mic2r
endm
;
Mic2p5 macro mic25p ; Consume 2.5μS x n
movlw mic25p
call Mic25r
endm
;
Mic5 macro mic5p ; Consume 5μS x n
movlw mic5p
call Mic25r
movlw mic5p
call Mic25r
endm
;
Mic50 macro mic50p ; Consume 50μS x n
movlw mic50p
call Mic50r
endm
;
Milli macro millip ; Consume mS x n
movlw millip
call Millir
endm
;
Mil100 macro mil100p ; Consume 100 mS x n
movlw mil100p
call Mil100r
endm
;
Secs macro secsp ; Consume Second x n
movlw secsp
call Secsr
endm
;
Mins macro minsp ; Consume Minute x n
movlw minsp
call Minsr
endm
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Debug and Abend macros ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
LEDon macro ; LED on macro for debugging
BANKSEL TRISdbg ; Select TRIS bank
btfsc TRISdbg,LED ; Is LED pin input?
bsf Flags,LEDpin ; Yes,show LED pin was input
bcf TRISdbg,LED ; Set LED output mode, in any case
clrf BSR ; Point Bank 0
nop ; Timing for PORTdbg changed
bsf PORTdbg,LED ; LED on
goto $+1 ; Timing for PORTdbg changed
endm
;
LEDoff macro ; LED off macro for debugging
goto $+1 ; Timing in case PORTdbg changed
bcf PORTdbg,LED ; LED off
btfss Flags,LEDpin ; Was LEDpin input before debug?
goto $+7 ; No, skip the followings
BANKSEL TRISdbg ; Select TRIS register
bsf TRISdbg,LED ; Set LED input mode again
nop ; nop for timing
BANKSEL WPUdbg ; Bank for WPUx
bsf WPUdbg,LED ; Weak Pull-up for LED port
clrf BSR ; Point Bank 0
nop ; Timing for PORTdbg changed
endm
;
Udebug macro Addr
movf Addr,W
call Udbgr
endm
;
Trigon macro ; DSO trigger on for debugging
BANKSEL TRISdbg ; Select TRIS bank
btfsc TRISdbg,Trig ; Is Trig pin input?
bsf Flags,Trigpin ; Yes, show Trig pin was input
bcf TRISdbg,Trig ; Set Trig output mode, in any case
clrf BSR ; Point Bank 0
nop ; Timing for PORTdbg changed
bsf PORTdbg,LED ; Trig on
goto $+1 ; Timing for PORTdbg changed
endm
;
Trigoff macro ; DSO trigger off for debugging
goto $+1 ; Timing in case PORTdbg changed
bcf PORTdbg,Trig ; Trig off
btfss Flags,Trigpin ; Was Trigpin input before debug?
goto $+7 ; No, skip the followings
BANKSEL TRISdbg ; Select TRIS register
bsf TRISdbg,Trig ; Set Trig input mode again
nop ; nop for timing
BANKSEL WPUdbg ; Bank for WPUx
bsf WPUdbg,Trig ; Weak Pull-up for Trig port
clrf BSR ; Point Bank 0
nop ; Timing for PORTdbg changed
endm
;
Uabend macro abn ; User Abnormal-end number
movlw abn
goto Uabendr
endm
;
Ublink macro bno ; Blink LED for specified times
movlw bno
call Ublinkr
endm
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Files and Equations ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Files ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
cblock H'20'
; For Application support
Abyte ; LCD I2C addr with R/W bit
Dbyte ; Data byte to save Sbyte
Ebyte ; The same purpose as Dbyte
Wbyte ; Working byte
;
; For I2C protocols
I2Cadr ; Destinated slave I2C address
DataLen ; Number of bytes to be sent/received
Sbyte ; One byte to be sent/received
Bitctr ; Loop counter for bits in a byte
;
; Areas for time consuming subroutines
; Do not change the sequences from Mic5c to Minsc
; if co-used with calculation parameters
Mic25c
Mic50c
Millic
Mil100c
Secsc
Minsc
;
; Areas for debugging routines
DmpA ; Display byte area
Dmp8C ; Bit counter for loop (Initial Dmp8V =8)
BlinkC ; Counter for blinking (set for Debugb or Abendb)
Abendn ; Abend number
Ucpc ; User Check point chr to trace
Flags
endc
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Equations ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; For PORTA ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;LED equ 0 ; PORTdbg LED for debugging
;Trig equ 0 ; PORTdbg Trig for debugging
;Dl equ 2 ; PORTI2C SDA
;Cl equ 1 ; PORTI2C SCL
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; *** Logical PORTI2C ; Change this when port changed
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
PORTI2C equ PORTA ;
Dl equ 2 ; I2C Data line = SDA
Cl equ 1 ; I2C Clock line = SCL
LATI2C equ LATA ; LATch for I2C port
TRISI2C equ TRISA ; TRIS reg for I2C
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; *** Logical PORTdbg ; Change this when port changed
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
PORTdbg equ PORTA
TRISdbg equ TRISA
WPUdbg equ WPUA
LED equ 0 ; LED when debugging
Trig equ 0 ; Trigger for DSO when debugging
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Values & Symbols ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Equations for LCD
LCDi2cA equ H'27' ; LCD I2C address (for Arduino)
lcdAw equ LCDi2cA*2 ; LCD I2C address<<1 and Write
lcdAr equ LCDi2cA*2+H'01' ; LCD I2C address<<1 and Read
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; For Debug ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
PORTdbg equ PORTA ;
Trig equ 0 ; DSO trigger pulse port for test use
;
Dmp8V equ D'8' ; Debug display bit counter initial value
Debugb equ D'8' ; number of blinkings to show Debugging
Abendb equ D'25' ; number of blinkings to notify Abend
; Flags byte
LEDsv equ 0 ; LED save bit in Flags byte
LEDpin equ 1 ; LED pin was input when not debugging
Trigpin equ 2 ; Trigger pin was input before debug use
;
page
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Initializing ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
org 0
goto Startp ; Go to start entry
org 4 ; This is Interrupt entry
retfie ;
;
Startp DEVset ; Define ports
clrf FSR0H ; Clear FSR0H forever
clrf FSR1H ; Clear FSR1H forever
clrf Flags ; Clear all bits of Flags
;
Milli D'50' ; Wait devices stabilized
call LCDinir ; Set-up LCD
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Main program loop ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Mainp equ $
LCDsetC 2,0
LCDw A'M'
LCDw A'e'
LCDw A'r'
LCDw A'r'
LCDw A'y'
LCDw A' '
LCDw A'C'
LCDw A'h'
LCDw A'r'
LCDw A'i'
LCDw A's'
LCDw A't'
LCDw A'm'
LCDw A'a'
LCDw A's'
;
LCDsetC 8,1
LCDw A'a'
LCDw A'n'
LCDw A'd'
;
LCDsetC 2,2
LCDw A'H'
LCDw A'a'
LCDw A'p'
LCDw A'p'
LCDw A'y'
LCDw A' '
LCDw A'H'
LCDw A'o'
LCDw A'l'
LCDw A'i'
LCDw A'd'
LCDw A'a'
LCDw A'y'
LCDw A's'
LCDw A'!'
;
LCDsetC 9,3
LCDw A'('
LCDw A'8'
LCDw A'_'
LCDw A'p'
LCDw A'i'
LCDw A'n'
LCDw A'_'
LCDw A'P'
LCDw A'I'
LCDw A'C'
LCDw A')'
;
Secs 1 ; delay
goto Mainp ; Continue infinite loop
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; LCDini= LCD initializing routine ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
LCDinir equ $
LCDsA ; Send LCD addr
I2Cstop
;
LCDl H'00' ; Start,send adr & 0x00, and Stop
Mil100 1
;
LCDl H'34'
LCDl H'30'
Milli 5
;
LCDl H'34'
LCDl H'30'
Mic50 4
;
LCDl H'34'
LCDl H'30'
Mic50 4
;
LCDl H'24'
LCDl H'20'
Mic50 4
;
LCDl H'24'
LCDl H'20'
LCDl H'84'
LCDl H'80'
Mic50 4
;
LCDl H'04'
LCDl H'00'
LCDl H'C4'
LCDl H'C0'
Mic50 3
;
LCDl H'04'
LCDl H'00'
LCDl H'14'
LCDl H'10'
Milli 2
;
LCDl H'04'
LCDl H'00'
LCDl H'64'
LCDl H'60'
Mic50 3
;
LCDl H'08' ; backlight on
Milli 1
return
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; LCD slave-adr sending routine ;
; with address in Sbyte, getting Ack. ;
; (start-I2C included, without stop-I2C) ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
lSndAr equ $
I2Cstat ; start I2C
movlw lcdAw ; get LCD slave adr
movwf Sbyte ; set it to Sbyte
call Sendr ; and send it
return
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; LCD I2C adr and a Literal sending routine ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
lSndALr movwf Dbyte ; save literal to Dbyte
call lSndAr ; send adr
movf Dbyte,W ; get saved literal
movwf Sbyte
call Sendr ; send it
I2Cstop ; stop I2C
return
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Set-cursor routine for LCD called by lcdSetC ; ;
; If W=0xab, send 0xaC, 0xa8, 0xbC, and 0xb8 ; ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
lSetCsr movwf Ebyte ; save Value into Ebyte
call lSetCss ; send left nibble
swapf Ebyte,W ; set W w/ swapping nibbles
call lSetCss ; send right nibble
;
Mic50 1
return
;
; lSetCss subroutine to send a nibble
lSetCss movwf Wbyte
movlw H'0F'
iorwf Wbyte,F ; set xF
movlw H'FC'
andwf Wbyte,W ; change it to xC
movwf Wbyte ; set it to Wbyte, too
call lSndALr ; send S, adr, nibble+C, and P
;
movlw B'11111011' ; get complement of 0C-08
andwf Wbyte,W ; and change C to 8, ie x8
call lSndALr ; send S, adr, nibble+8, and P
return
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; LCD send-char routine ;
; If W=0xab, send 0xaD, 0xa9, 0xbD, and 0xb9 ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
lSetChr movwf Ebyte ; save Value into Ebyte
; sending left nibble
call lSetChs
;
; sending right nibble
swapf Ebyte,W ; replace left nibble w/ right
call lSetChs
return
;
; LCD subroutine to send a character ;
lSetChs movwf Wbyte ; W to Wbyte
movlw H'0F' ; set right nibble bits of
iorwf Wbyte,F ; Wbyte on
movlw H'FD' ; leave left nibble + right D
andwf Wbyte,W ; into W
movwf Wbyte ; save it into Wbyte
call lSndALr ; send S, adr, nibble+D, and P
;
movf Wbyte,W
movlw B'11111011' ; target bit 2 to off (D to 9)
andwf Wbyte,W ; make left nibble + right 9
call lSndALr ; send S, adr, nibble+9, and P
return
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; LCD.clear routine ;
; Send 0x8C, 0x88, 0x0C, and 0x08 ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
lClr equ $
LCDw H'8C'
LCDw H'88'
LCDw H'0C'
LCDw H'08'
Mic50 1
return
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; I2C Send byte-string for general purpose ;
; when calling, ;
; I2C device adr to be set in I2Cadr byte ;
; Data length in DataLen ;
; Data Addr in FSR0L (INDF0) ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
I2Csndr movf I2Cadr,W
movwf Sbyte
bcf Sbyte,0 ; indicate write
;
I2Cstat ; Start I2C
call Sendr
Sdata movf INDF0,W ; Get a sending character
movwf Sbyte ; Set it to Sbyte
call Sendr ; Send it to the device
;
incf FSR0L,F ; point next char
decfsz DataLen,F ; Have all chars sent ?
goto Sdata ; No, loop
;
; Stop signal and return
I2Cstop
Mic50 1
return
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; I2C Receive byte-string for general purpose ;
; when calling, ;
; I2C device adr to be in I2Cadr byte ;
; Data length in DataLen ;
; Data Addr in FSR0L (INDF0) ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
I2Crcvr equ $
I2Cstat ; Start I2C
movf I2Cadr,W ; Get I2C dev addr
movwf Sbyte ; Set it into Sbyte
; rlf Sbyte,F ; Shift left (if adr for Arduino)
bsf Sbyte,0 ; indicate read
call Sendr ; Send slave addr to read
;
I2Crbyt equ $
BANKSEL TRISI2C ;
bsf TRISI2C,Dl ; Set Dline input mode
clrf BSR ; Point Bank 0
;
movlw 8 ; Bits in a reciving byte
movwf Bitctr ; into loop counter
I2Crblp Mic5 1 ; Timing before raising clock
bsf PORTI2C,Cl ; Set clock high
Mic2p5 1 ; Timing after raising clock
;
btfsc PORTI2C,Dl
goto Rbith
; goto Rbitl
;
Rbitl bcf Sbyte,0 ; Clear bit 0
goto Rbitnxt ; and goto next
;
Rbith bsf Sbyte,0 ; Set bit 0
Rbitnxt Mic2p5 1 ; Timing after checking
bcf PORTI2C,Cl ; Set clock low
; Mic2p5 1 ; Timing after clock falling
decfsz Bitctr,F ; Still bits?
goto Rbcont ; Yes, continue
goto Rbend ; No, end of one byte
;
Rbcont rlf Sbyte,F ; Shit left
goto I2Crblp ; and goto loop
;
Rbend movf Sbyte,W ; Get received byte
movwf INDF0 ; Set it to INDF0
incf FSR0L,F ; increase index
decfsz DataLen,F ; DataLen-1
goto Sackr ; Send Ack and continue
goto Snackr ; Send Nack and stop
;
;Set Dl output mode and send Ack to conitinue
Sackr equ $
BANKSEL LATI2C ; Data line high when output mode
bsf LATI2C,Dl ; Lat-Dl on
BANKSEL TRISI2C ;
bcf TRISI2C,Dl ; Set Dl output mode
clrf BSR ; Point Bank 0
;
bcf PORTI2C,Dl ; Send Ack
Mic2p5 1 ; Timing after clock falling
bsf PORTI2C,Cl ; Show Ack
Mic2p5 2
bcf PORTI2C,Cl ; Set clock low
Mic2p5 1
bsf PORTI2C,Dl ; Return Dline to high
goto I2Crbyt ; Next byte process
;
;Set Dl output mode and send Nack
Snackr equ $
BANKSEL LATI2C ; Data line high when output mode
bsf LATI2C,Dl ; Lat-Dl on
BANKSEL TRISI2C ;
bcf TRISI2C,Dl ; Set Dl output mode
clrf BSR ; Point Bank 0
;
bsf PORTI2C,Dl ; Send Nack
Mic2p5 1 ; Timing after clock falling
bsf PORTI2C,Cl ; Show Nack
Mic2p5 2
bcf PORTI2C,Cl ; Set clock low
Mic2p5 2
I2Cstop ; and stop I2C once
Mic5 D'10' ; for 50 micro sec
;
I2Cstat ; then start I2C again
movf I2Cadr,W ; Get I2C dev addr
movwf Sbyte ; Set it into Sbyte
rlf Sbyte,F ; Shift left
bcf Sbyte,0 ; indicate write
call Sendr ; Send it
;
I2Cstop
return
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; I2C Start signal routine ;
; when dataline mode is output ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
I2Cstar bcf PORTI2C,Dl ; set SDA low
Mic2p5 1
bcf PORTI2C,Cl ; set SCL low
Mic2p5 3
return
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; I2C Stop signal routine ;
; when dataline mode is output ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
I2Cstpr bcf PORTI2C,Cl ; set SCL low
Mic2p5 1
bcf PORTI2C,Dl ; set SDA low
Mic2p5 4
bsf PORTI2C,Cl ; Clock line rasing
Mic2p5 2
bsf PORTI2C,Dl ; Data line rasing
Mic2p5 1
return
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; I2C One-byte sending routine + getting Ack ;
; with data in Sbyte ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Sendr movlw 8 ; Set bit count in a byte
movwf Bitctr ; into loop counter
;
Sloop btfsc Sbyte,7 ; Check top bit of Sbyte
goto Slpdh ;
bcf PORTI2C,Dl ; If bit low then Data L
goto Slpnxt
Slpdh bsf PORTI2C,Dl ; If bit high then Data H
;
Slpnxt Mic2p5 1
bsf PORTI2C,Cl ; Show bit
Mic2p5 2
bcf PORTI2C,Cl ;
Mic2p5 1
;
rlf Sbyte,F ; Shift left
decfsz Bitctr,F ; All bits done?
goto Sloop ; No, loop within a byte
;
;Receive Ack
; set data line input mode
BANKSEL TRISI2C ;
bsf TRISI2C,Dl ; Set Dline input mode
clrf BSR ; Point Bank 0
;
Mic2p5 1 ; wait for Ack timing
bsf PORTI2C,Cl ; Clock H for Acq confirmation
Mic2p5 2 ;
bcf PORTI2C,Cl ; Cl L for Dl release by slave
Mic2p5 2
;
; Set Data line output
BANKSEL LATI2C ; Data line high when output mode
bsf LATI2C,Dl ; Lat-Dl on
BANKSEL TRISI2C ;
bcf TRISI2C,Dl ; Set Dl output mode
clrf BSR ; Point Bank 0
return
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Timing subrooutines for general purposes ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Make 2.0 micro S x n (Mic2) ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Mic2r movwf Mic25c ; + Wset + call = 1 micro sec
;
Mic2l decfsz Mic25c,F ; If exhausted, 1 micro S hereafter
goto Mic2li ; else go out (2nd time 1.75 mic sec)
return
;
Mic2li goto $+1 ; (2nd time 2.25 mic sec)
nop ; (2nd time 2.5 mic sec)
goto Mic2l ; go back (2nd time 3 micro sec)
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Make 2.5 micro S x n (Mic2p5) ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Mic25r movwf Mic25c ; + Wset + call = 1 micro sec
nop ; 1.25 micro sec
;
Mic25l nop ; 1.5 micro sec (2nd time 4 mic sec)
decfsz Mic25c,F ; If exhausted, 1 micro S hereafter
goto Mic25li ; else go out (2nd time 2.25 mic sec)
return
;
Mic25li Mic ; (2nd time 3.25 mic sec)
goto Mic25l ; go back (2nd time 3.75 micro sec)
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; 50 Microseconds x n Mic50 ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
Mic50r movwf Mic50c ; set how many 50 microsec (1 micro sec to here)
nop ; 1.25 micro sec up to here
;
Mic50l Mic2p5 D'19' ; + 47.5 = 48.75 mic sec (2nd time 98.75 mic sec)
nop ; + 0.25 = 49 micro sec (2nd time 99 mic sec)
;
decfsz Mic50c,F ; If exhausted then 1 mic S hereafter
goto Mic50li ; else go out (2nd time 49.75 mic sec)
return
;
;
Mic50li Mic ; (2nd time 50.75 mic sec)
goto Mic50l ; go back (2nd time 51.25 mic sec)
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Milliseconds x n (Milli) ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
Millir movwf Millic ; set how many 1 mil sec (1 mic S up to here)
nop ; 1.25 micro sec
;
Millil Mic50 D'19' ; + 50 mic x 19 = 951.25 mic S (2nd, 1951.25)
Mic2p5 D'19' ; + 47.5 mic = 998.75 micro S (2nd, 1998.75)
nop ; +0.25 mic = 999 micro sec (2nd, 1999)
;
decfsz Millic,F ; If exhausted then 1 micro sec hereafter
goto Millili ; else go out (2nd, 999.75 mic S)
return
;
Millili Mic ; (2nd time 1000.75 mic S)
goto Millil ; go back (2nd time 1001.25 mic S)
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; 100 Milliseconds x n (Mil100);
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Mil100r movwf Mil100c ;set how many 100 ms(1 micr sec up to here)
nop ; 1.25 micro sec
;
Milhl Milli D'99' ;+1ms x 99 = 99001.25 micS (2nd,199001.25mic)
Mic50 D'19' ; + 950 mic = 99951.25 micS(2nd.199951.25mic)
Mic2p5 D'19' ; + 47.5 mic = 99998.75micS(2nd,199998.75mic)
nop ; + 0.25 mic = 99999 mic S (2nd,199999 micS)
;
decfsz Mil100c,F ; If exhausted then 1 micro sec hereafter
goto Milhli ; else go out (2nd time, 99999.75 mic S)
return
;
Milhli Mic ; (2nd time, 100000.75 mic S)
goto Milhl ; (2nd time, 100001.25 mic S)
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Seconds x n (Secs) ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
Secsr movwf Secsc ; set how many sec ( 1 mic sec up to here)
nop ; 1.25 micro sec
;
Secsl Mil100 D'9' ;
Milli D'99' ; + 999 milli sec = 999001.25 micro sec
;
Mic50 D'19' ; + 950 mic = 999951.25 micro sec
Mic2p5 D'19' ; + 47.5 mic = 999998.75 micro sec
nop ; + 0.25 mic = 999999 micro sec
;
decfsz Secsc,F ; If exhausted then 1 micro sec hereafter
goto Secsli ; else, go out
return
;
Secsli Mic
goto Secsl ; (Second time, Sec + 1.25 micro sec)
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Minutes x n (Mins) ;
; Overhead ignored, that is only ;
; 751.25 Mic S even when 100 Min ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Minsr movwf Minsc ;set how many minutes from parameter
;
Minsl Secs D'60' ; 1 Seconds x 60
decfsz Minsc,F
goto Minsl
return
;
space
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; User debug subroutine ;
; Show bit 7 to 0 ;
; of specified byte ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Udbgr clrf BSR ; Set Bank=0
movwf DmpA ; move data to Dmpa
;
btfss PORTdbg,LED ; Check if LED=on (on=High)
goto UdbLoff ; if LED=off(Low), skip saving process
bsf Flags,LEDsv ; Save LEDon status
LEDoff ; and off LED
Mil100 D'10' ; wait for a second in case LED has been on
;
UdbLoff movlw Dmp8V ; set counter 8
movwf Dmp8C ; to Dmp8C
;
Udblp Ublink Debugb ; Blink for Debug = 8 times
btfsc DmpA,7 ; check top bit 7
goto UdbOn ; if on then to UdbOn
goto UdbOff ; if off then to UdbOff
;
UdbOn LEDon
Mil100 D'30' ;
goto Udbeck
;
UdbOff LEDoff
Mil100 D'30' ;
; goto Udbeck
;
Udbeck decfsz Dmp8C,F
goto Udbnext
goto Udbend
;
Udbnext rlf DmpA,F
goto Udblp
;
Udbend Ublink Debugb ; end blinking and
Mil100 D'100' ; blank for 10 seconds to write down
;
btfss Flags,LEDsv ; Check if LED was on
goto Udbret ; no, goto return
LEDon ; if it was on, then on again
bcf Flags,LEDsv ; Clear LED save flag
;
Udbret return
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Blinking to show debug or abend ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Ublinkr movwf BlinkC
Ublinkl LEDon ; LED on
Milli D'30' ; for 30ms
LEDoff ; LED off
Milli D'200' ; for 200ms
;
decfsz BlinkC,F
goto Ublinkl
return
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Abend routine ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Uabendr clrf BSR
movwf Abendn ; Set Uabend number
;
Ublink Abendb ; Blink 25 times
Udebug Abendn ; Show Abend number
goto $
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; End of program ;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
end
上のコーディングでは他のI2Cセンサーがつけられるよう汎用I2C対応ができるようにしています(ただしRead String部分は未テスト。とはいえ、1バイトずつ読めばなくてもよいですし)。このLCDではもちろんReadは要りませんが。
ディスプレイが使えることで要らなくなったデバッグ用のコーディング部分(最後のほう)もそのまま含めています。ここはすっぽり外して問題ないもの。
全体594命令から不要なデバッグ用コードをはずせば、僅か350命令です。プログラム容量(2048ワード)の17%に収まります。また、RAMメモリーは128バイトのうち、デバッグ用も含めて20バイトしか使っていませんので、RAM容量も16%未満に収めることができました。
これで、今後小型PICからも楽に使えることになったので、今回週末を使った甲斐がありました\(^o^)/。
センサー装置の基盤としてはコスパ最高かも。なにせ1602LCDの場合なら300円ほどでできる環境ですから。
この記事がもしどなたかのお役に立つようであれば幸いです。
©2020 Akira Tominaga, All rights reserved.